




ইন্টেলিজেন্ট ভালভ কোর অ্যাসেম্বলি সিস্টেমের ডিজাইন এবং গবেষণার উপর বিস্তারিত আলোচনা
ভূমিকা
যেহেতু সমাবেশ সিস্টেম একটি উত্পাদন লাইন এবং একটি বুদ্ধিমান উত্পাদন ইউনিট, বুদ্ধিমান নিয়ন্ত্রণ প্রযুক্তি এবং পরিমার্জিত প্রক্রিয়াকরণের ক্রমাগত উন্নতির সাথে, এর অটোমেশনের ডিগ্রি ক্রমাগত বৃদ্ধি পাচ্ছে।শেষ করুন।এই কাগজে ডিজাইন করা ভালভ কোর কন্ট্রোল ইন্টেলিজেন্ট অ্যাসেম্বলি সিস্টেম উপাদান নির্বাচন এবং ভালভ লকিংয়ের মূল অটোমেশন উপলব্ধি করে এবং ত্রুটিযুক্ত পণ্যগুলি সমাবেশ সাজানোর জন্য সনাক্তকরণ সিস্টেমের সাথে একীভূত হয়।সিস্টেমটি চালাতে পিএলসি এবং মানব-মেশিন ইন্টারফেস গ্রহণ করুন এবং যান্ত্রিক কাঠামো ডিজাইন এবং যুক্তিসঙ্গত।এই সিস্টেমের ডিজাইনের সমাপ্তি ব্যাপকভাবে উত্পাদন দক্ষতা উন্নতভালভ কোরভালভের উপর মাউন্ট করা হয়েছে, এবং এই ধরনের সিস্টেমের নির্মাণের জন্য একটি উদাহরণ প্রদান করে।
সংখ্যা দ্রুত বৃদ্ধি সঙ্গেভালভ অংশ, বাতাসের পরিমাণ ক্রমাগত বাড়তে থাকে, যা স্বয়ংক্রিয় ড্রাইভিং গাড়িটি দরজার উপর থাকে এবং দরজার উপর গাড়ির কোরটি আরও বেশি ঘন ঘন হয় এবং দরজাটি লক করা যায় না।একজন বুদ্ধিমান সনাক্তকরণ ফাংশন উপলব্ধি করতে পারে বুদ্ধিমান মডিউল বুদ্ধিমান মডিউলে বুদ্ধিমান সমস্যা উপলব্ধি করতে পারে [1]।উত্পাদন দক্ষতা এবং ভাল হার উন্নত.
1. ভালভ কোর এবং এর সমাবেশ প্রক্রিয়ার অসুবিধা বিশ্লেষণ
এই গবেষণায়, অন্যান্য স্বয়ংক্রিয় সমাবেশ সিস্টেমের নকশা অভিজ্ঞতা শোষণ করার পরে, বিদ্যমান আধা-স্বয়ংক্রিয় সমাবেশ সিস্টেম বিশ্লেষণ করা হয়েছিল, এবং সিস্টেমের যান্ত্রিক অংশটি সম্পূর্ণরূপে ভালভ কোর সমাবেশ প্রক্রিয়ার অনুকরণের উপর ভিত্তি করে ডিজাইন করা হয়েছিল।সিস্টেম ডিজাইন প্ল্যানে, আমরা যান্ত্রিক অংশগুলির প্রক্রিয়াকরণকে সুবিধাজনক করতে, খরচ কমাতে, অংশগুলির সমাবেশকে সহজ এবং সহজ করতে এবং নির্ভরযোগ্যতা বাড়ানোর জন্য সিস্টেমটিকে একটি নির্দিষ্ট মাত্রার উন্মুক্ততা এবং প্রসারিত করার জন্য চেষ্টা করি। এবং সিস্টেমের দক্ষতা।, এবং সিস্টেমের ব্যয় কর্মক্ষমতা উন্নত করার জন্য একটি ভাল ভিত্তি স্থাপন করে।
ভালভ কোর সমাবেশ সিস্টেমএটির যান্ত্রিক কাঠামোর নকশার পরিপ্রেক্ষিতে প্রধানত তিনটি অংশে বিভক্ত, যথা: ওয়ার্কবেঞ্চের উপরের বাম কোণে দুটি সমাবেশ অংশ, নীচের বাম কোণে তিনটি সমাবেশ অংশ এবং ওয়ার্কবেঞ্চ অংশের ডানদিকে সাতটি সমাবেশ অংশ।টু-পিস অ্যাসেম্বলির প্রযুক্তিগত অসুবিধা হল কীভাবে সিলিং রিংয়ের বৃত্তাকার আকৃতি নিশ্চিত করা যায়।কাটার প্রক্রিয়া চলাকালীন, এটি ব্লেডের অক্ষীয় এক্সট্রুশন শক্তির অধীন হবে, তাই এটি বিকৃত করা সহজ।দ্বিতীয়ত, অ্যাসেম্বলি প্রক্রিয়া চলাকালীন, যখন ট্রান্সফার টুলিং কম্পোনেন্টে একটি কোরড রড সনাক্ত করা হয়, তখন কম্পনের মাধ্যমে দরজার কোরের বিভিন্ন উপাদানের মধ্যে স্ক্রীনিং এবং সমাবেশ উপলব্ধি করা প্রয়োজন।অতএব, প্রতিটি উপাদান অ্যাসেম্বলি লিঙ্ক হওয়ার জন্য সংশ্লিষ্ট অবস্থানে পড়ে।প্রক্রিয়া অসুবিধা নিহিত.উপরের সমস্যাগুলি এই পর্যায়ে ভালভ কোর সমাবেশে ত্রুটিযুক্ত পণ্যের হার বৃদ্ধির প্রধান কারণ।এর উপর ভিত্তি করে, এই কাগজটি ভালভ কোর সমাবেশের প্রক্রিয়াটিকে অপ্টিমাইজ করে এবং ভালভ কোর সমাবেশের যোগ্যতার হার উন্নত করতে একটি গুণমান পরিদর্শন ব্যবস্থা যোগ করে।
2. ভালভ মুখের উপর ভালভ কোর বুদ্ধিমান সিস্টেম নকশা
-
2.1 বুদ্ধিমান ভালভ কোর সমাবেশ স্কিম নকশা
অপারেশন ইন্টারফেস এবং পিএলসি একটি লজিক কন্ট্রোল অংশ গঠন করে এবং ডিটেকশন সিস্টেম এবং পিএলসি-তে অ্যাসেম্বলি সিস্টেমের স্ট্যাটাস ডেটা সংগ্রহ করতে এবং কন্ট্রোল সিগন্যাল আউটপুট করার জন্য দ্বিমুখী তথ্য প্রবাহ রয়েছে।এক্সিকিউটিভ অংশ হিসাবে, ড্রাইভ সিস্টেম সরাসরি PLC আউটপুট অংশ দ্বারা নিয়ন্ত্রিত হয়।খাওয়ানোর ব্যবস্থা ব্যতীত, যার জন্য ম্যানুয়াল সহায়তা প্রয়োজন, এই সিস্টেমের অন্যান্য প্রক্রিয়াগুলি বুদ্ধিমান সমাবেশ উপলব্ধি করেছে।ভালো মানব-কম্পিউটার মিথস্ক্রিয়া টাচ স্ক্রিনের মাধ্যমে অর্জন করা হয়।যান্ত্রিক নকশায় অপারেশনের সুবিধার কথা বিবেচনা করে, দরজার কোর বসানো বাক্সটি টাচ স্ক্রিনের সংলগ্ন।ডিটেকশন মেকানিজম, ডোর কোর টপ-ওপেনিং ব্লোয়িং কম্পোনেন্ট, ভালভ কোর হাইট ডিটেকশন কম্পোনেন্ট এবং ব্ল্যাঙ্কিং মেকানিজম যথাক্রমে টার্নটেবল টুলিং কম্পোনেন্টের চারপাশে সাজানো হয়েছে, ডোর কোর অ্যাসেম্বলির অ্যাসেম্বলি লাইন প্রোডাকশন লেআউট উপলব্ধি করে।সনাক্তকরণ সিস্টেমটি প্রধানত কোর রড সনাক্তকরণ, ইনস্টলেশন উচ্চতা সনাক্তকরণ, গুণমান পরিদর্শন ইত্যাদি সম্পন্ন করে, যা শুধুমাত্র উপাদান নির্বাচন এবং ভালভ কোর লকের অটোমেশন উপলব্ধি করে না, তবে সমাবেশ প্রক্রিয়ার স্থায়িত্ব এবং উচ্চ দক্ষতাও নিশ্চিত করে।সিস্টেমের প্রতিটি ইউনিটের গঠন নিচের চিত্রে দেখানো হয়েছে।

চিত্র 1-এ দেখানো হয়েছে, টার্নটেবল পুরো প্রক্রিয়া প্রবাহের কেন্দ্রীয় লিঙ্ক, এবং ভালভ কোরের সমাবেশ টার্নটেবলের ড্রাইভ দ্বারা সম্পন্ন হয়।যখন দ্বিতীয় সনাক্তকরণ প্রক্রিয়াটি একত্রিত হওয়ার উপাদান সনাক্ত করে, তখন এটি নিয়ন্ত্রণ ব্যবস্থায় একটি সংকেত পাঠায় এবং নিয়ন্ত্রণ ব্যবস্থা প্রতিটি প্রক্রিয়া ইউনিটের কাজকে সমন্বয় করে।প্রথমত, ভাইব্রেটিং ডিস্ক দরজার কোরকে নাড়িয়ে দেয় এবং এটিকে ইনটেক ভালভের মুখে লক করে দেয়।প্রথম সনাক্তকরণ প্রক্রিয়াটি ভালভ কোরগুলিকে সরাসরি স্ক্রীন করবে যা সফলভাবে খারাপ উপকরণ হিসাবে ইনস্টল করা হয়নি।কম্পোনেন্ট 6 সনাক্ত করে যে ভালভ কোরের বায়ুচলাচল যোগ্য কিনা, এবং কম্পোনেন্ট 7 সনাক্ত করে যে ভালভ কোরের ইনস্টলেশন উচ্চতা মান পূরণ করে কিনা।শুধুমাত্র উপরের তিনটি ধাপে যোগ্য পণ্যগুলিকে ভাল পণ্য বাক্সে বাছাই করা হবে, অন্যথায় সেগুলি ত্রুটিপূর্ণ পণ্য হিসাবে বিবেচিত হবে।
2.2 ভালভ কোর সমাবেশ সিস্টেমের মূল উপাদানগুলির নকশা
ভালভের উপর ভালভ কোর ইনস্টল করার মূল প্রক্রিয়া হিসাবে, ভালভ কোর লক করার জন্য ভালভ কোরের চলাচলের অবস্থানের নির্ভুলতার উপর খুব উচ্চ প্রয়োজনীয়তা রয়েছে, তাই এটি সম্পূর্ণ করার জন্য অনুদৈর্ঘ্য এবং পার্শ্বীয় প্রক্রিয়াগুলির সমন্বয় প্রয়োজন।এই অংশের ডিজাইনে, এটি একটি একক ক্রিয়াতে পচে যায়, ভালভ কোরের ডিসচার্জিং অ্যাকশন, লকিং লিভারের লকিং অ্যাকশন এবং ভালভের অগ্রভাগে ভালভ কোর লোড করার ক্রিয়া।এর যান্ত্রিক গঠন চিত্র 2 এ দেখানো হয়েছে।
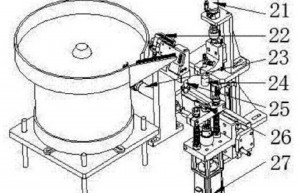
চিত্র 2 থেকে দেখা যায়, ভালভ কোর সমাবেশের যান্ত্রিক কাঠামো তিনটি অংশে বিভক্ত।তিনটি অংশ একে অপরকে প্রভাবিত না করে সমন্বয়ে কাজ করে।স্বাধীন ক্রিয়া সম্পন্ন হলে, সিলিন্ডারটি পরবর্তী সমাবেশ অবস্থানে যাওয়ার জন্য প্রক্রিয়াটিকে ধাক্কা দেয়।চলমান অবস্থানের নির্ভুলতা নিশ্চিত করার জন্য, 1.4 মিমি এর মধ্যে ত্রুটি নিয়ন্ত্রণ করতে বৈদ্যুতিক নিয়ন্ত্রণ এবং যান্ত্রিক সীমার ব্যাপক নকশা গৃহীত হয়।ভালভ কোর এবং ভালভ অগ্রভাগের কেন্দ্রটি সমাক্ষীয়, যাতে সার্ভো মোটর ভালভের কোরটিকে ভালভ অগ্রভাগে মসৃণভাবে ধাক্কা দিতে পারে, অন্যথায় এটি অংশগুলির ক্ষতি করবে।
যান্ত্রিক কাঠামোর স্থবিরতা বা বৈদ্যুতিক সংকেতের অস্বাভাবিক স্পন্দন সমাবেশের কাজে সামান্য বিচ্যুতি ঘটাতে পারে।ফলস্বরূপ, ভালভ কোর একত্রিত হওয়ার পরে, বায়ুচলাচল কার্যকারিতা মান পর্যন্ত হয় না এবং সমাবেশের উচ্চতা যোগ্য নয়, যা পণ্যটির ব্যর্থতার দিকে পরিচালিত করে।এই ফ্যাক্টরটি সম্পূর্ণরূপে সিস্টেম ডিজাইনে বিবেচনা করা হয়, বায়ু ঘা সনাক্তকরণ এবং উচ্চতা সনাক্তকরণ খারাপ পণ্য বাছাই করতে ব্যবহৃত হয়।
2.3 ভালভ কোর সমাবেশ নিয়ন্ত্রণ সিস্টেমের নকশা
এই ডিজাইনের কন্ট্রোল সিস্টেমে প্রধানত পিএলসি লজিক কন্ট্রোল, সার্ভো মোটর ড্রাইভ সিস্টেম, ডিটেকশন সিস্টেম এবং এইচএমআই ম্যান-মেশিন ইন্টারফেস অন্তর্ভুক্ত রয়েছে।সার্ভো ড্রাইভ সিস্টেমটি মূলত একটি সার্ভো মোটর, একটি রিডুসার ইত্যাদির সমন্বয়ে গঠিত, যা সংকেত পাওয়ার পরে যান্ত্রিক অংশগুলিকে সরাতে চালিত করে।সার্ভো সিস্টেম পিএলসি নিয়ন্ত্রণের অধীনে সুনির্দিষ্ট অবস্থান এবং গতি সমন্বয় উপলব্ধি করতে পারে।সনাক্তকরণ সিস্টেমের মধ্যে রয়েছে ফটোইলেকট্রিক সেন্সর, লাইট সেন্সর, লেজার সেন্সর ইত্যাদি, যা প্রধানত পজিশনিং ডিটেকশন, পার্টস ডিটেকশন এবং আইডেন্টিফিকেশন এবং প্রসেস সিকোয়েন্স ম্যাচিং এর কাজগুলি উপলব্ধি করে।HIM ম্যান-মেশিন ইন্টারফেস গ্রাফিকাল প্রোগ্রামিং মডিউল গ্রহণ করে, যা ভাল ম্যান-মেশিন মিথস্ক্রিয়া উপলব্ধি করতে পারে।অপারেটর সরাসরি অপারেশন ইন্টারফেসের মাধ্যমে সিস্টেম নিয়ন্ত্রণ করতে পারে, এবং সমাবেশ প্রক্রিয়া এবং পরামিতিগুলি সরাসরি ইন্টারফেসের মাধ্যমে প্রদর্শিত হতে পারে।
সিস্টেমটি অপারেশন ইন্টারফেসের মাধ্যমে ম্যানুয়াল সমাবেশ মোড এবং স্বয়ংক্রিয় সমাবেশ মোড নির্বাচন করতে পারে।স্বয়ংক্রিয় মোডে, সিস্টেম স্বয়ংক্রিয়ভাবে সমাবেশ প্রক্রিয়া অনুযায়ী একত্রিত হয়।ম্যানুয়াল অপারেশন মোডে, সিস্টেমটি একক ধাপে চলে এবং প্রতিটি অপারেশন ক্রিয়া ক্রমাগত চলবে না।সিস্টেম প্রোগ্রামের সঞ্চালন টার্নটেবল রোটেশনের সাব-নেটওয়ার্ক থেকে শুরু হয়, পিএলসি কন্ট্রোল সিগন্যাল কন্ট্রোল আউটপুট করে এবং সার্ভো মোটর ডিস্কের লোডিং এবং ঘূর্ণন চালায়।যখন টার্নটেবল ভালভ কোরটিকে সংশ্লিষ্ট প্রযুক্তিগত প্রক্রিয়া অবস্থানে নিয়ে যায়, তখন প্রযুক্তিগত প্রক্রিয়া সাবরুটিন চলে এবং কার্যকরী উপাদান নিয়ন্ত্রণ সংকেত অনুসারে সংশ্লিষ্ট ক্রিয়া সম্পাদন করে।
3. সমাপ্তি
ভালভ কোর ইনস্টলেশন প্রক্রিয়া প্রবাহভালভএটি জটিল নয়, তবে প্রক্রিয়াটির পরিমার্জনের জন্য প্রয়োজনীয়তা তুলনামূলকভাবে বেশি।অতএব, ম্যানুয়াল সমাবেশ এবং আধা-স্বয়ংক্রিয় সমাবেশ প্রধানত শিল্প উৎপাদনে ব্যবহৃত হয় এবং তাদের কর্মক্ষমতা এবং গুণমান অস্থির।এই কাগজে, ভালভের উপর মাউন্ট করা ভালভ কোরের জন্য একটি বুদ্ধিমান সমাবেশ সিস্টেম ডিজাইন করা হয়েছে, যা উপাদান নির্বাচন এবং ভালভ কোর লকিংয়ের স্বয়ংক্রিয়তা উপলব্ধি করে এবং সনাক্তকরণ সিস্টেমের মাধ্যমে ভালভ কোর সমাবেশের বায়ুচলাচল কর্মক্ষমতা এবং ইনস্টলেশন উচ্চতা সনাক্ত করে, এবং সনাক্তকরণ ফলাফল স্বয়ংক্রিয়ভাবে ত্রুটিযুক্ত পণ্য স্বয়ংক্রিয় বাছাই উপলব্ধি নিয়ন্ত্রণ সিস্টেমে আপলোড করা হয়.ভালভ অগ্রভাগে মাউন্ট করা ভালভ কোরের কাজের দক্ষতা এবং পণ্যের স্থায়িত্ব উন্নত হয়।
এখানে আপনার বার্তা লিখুন এবং আমাদের পাঠান





