




১. ভালভ কোর অ্যাসেম্বলি প্রক্রিয়ায় অসুবিধা
এই গবেষণায়, অন্যান্য স্বয়ংক্রিয় সমাবেশ সিস্টেমের নকশা অভিজ্ঞতা শোষণ করার পর, বিদ্যমান আধা-স্বয়ংক্রিয় সমাবেশ সিস্টেম বিশ্লেষণ করা হয়েছিল, এবং সিস্টেমের যান্ত্রিক অংশটি সম্পূর্ণরূপে সিমুলেশনের উপর ভিত্তি করে ডিজাইন করা হয়েছিলভালভ কোরসমাবেশ প্রক্রিয়া। সিস্টেম ডিজাইন পরিকল্পনায়, আমরা যান্ত্রিক যন্ত্রাংশের প্রক্রিয়াকরণকে সুবিধাজনক করার, খরচ কমানোর, যন্ত্রাংশের সমাবেশকে সহজ এবং সহজ করার এবং সিস্টেমের নির্ভরযোগ্যতা এবং দক্ষতা বৃদ্ধির জন্য সিস্টেমটিকে একটি নির্দিষ্ট মাত্রার উন্মুক্ততা এবং প্রসারণযোগ্যতা দেওয়ার চেষ্টা করি। , এবং সিস্টেমের খরচ কর্মক্ষমতা উন্নত করার জন্য একটি ভাল ভিত্তি স্থাপন করি।
দ্যভালভমূলঅ্যাসেম্বলি সিস্টেমটি তার যান্ত্রিক কাঠামোর নকশার দিক থেকে প্রধানত তিনটি ভাগে বিভক্ত, যথা: ওয়ার্কবেঞ্চের উপরের বাম কোণে দুটি অ্যাসেম্বলি অংশ, নীচের বাম কোণে তিনটি অ্যাসেম্বলি অংশ এবং ওয়ার্কবেঞ্চ অংশের ডান দিকে সাতটি অ্যাসেম্বলি অংশ। টু-পিস অ্যাসেম্বলির প্রযুক্তিগত অসুবিধা সিলিং রিংয়ের বৃত্তাকার আকৃতি কীভাবে নিশ্চিত করা যায় তার মধ্যে নিহিত। কাটার প্রক্রিয়া চলাকালীন, এটি ব্লেডের অক্ষীয় এক্সট্রুশন বলের শিকার হবে, তাই এটি বিকৃত করা সহজ। দ্বিতীয়ত, অ্যাসেম্বলি প্রক্রিয়া চলাকালীন, যখন ট্রান্সফার টুলিং উপাদানে একটি কোরড রড সনাক্ত করা হয়, তখন কম্পনের মাধ্যমে দরজার কোরের বিভিন্ন উপাদানের মধ্যে স্ক্রিনিং এবং সমাবেশ উপলব্ধি করা প্রয়োজন। অতএব, প্রতিটি উপাদান অ্যাসেম্বলি লিঙ্কে পরিণত হওয়ার জন্য সংশ্লিষ্ট অবস্থানে পড়ে। প্রক্রিয়ার অসুবিধা নিহিত। এই পর্যায়ে ভালভ কোর অ্যাসেম্বলিতে ত্রুটিপূর্ণ পণ্যের হার বৃদ্ধির প্রধান কারণ হল উপরের সমস্যাগুলি। এর উপর ভিত্তি করে, এই কাগজটি ভালভ কোর অ্যাসেম্বলির প্রক্রিয়াটিকে অপ্টিমাইজ করে এবং ভালভ কোর অ্যাসেম্বলির যোগ্যতা হার উন্নত করার জন্য একটি গুণমান পরিদর্শন ব্যবস্থা যুক্ত করে।
2. ইন্টেলিজেন্ট ভালভ কোর অ্যাসেম্বলি স্কিম
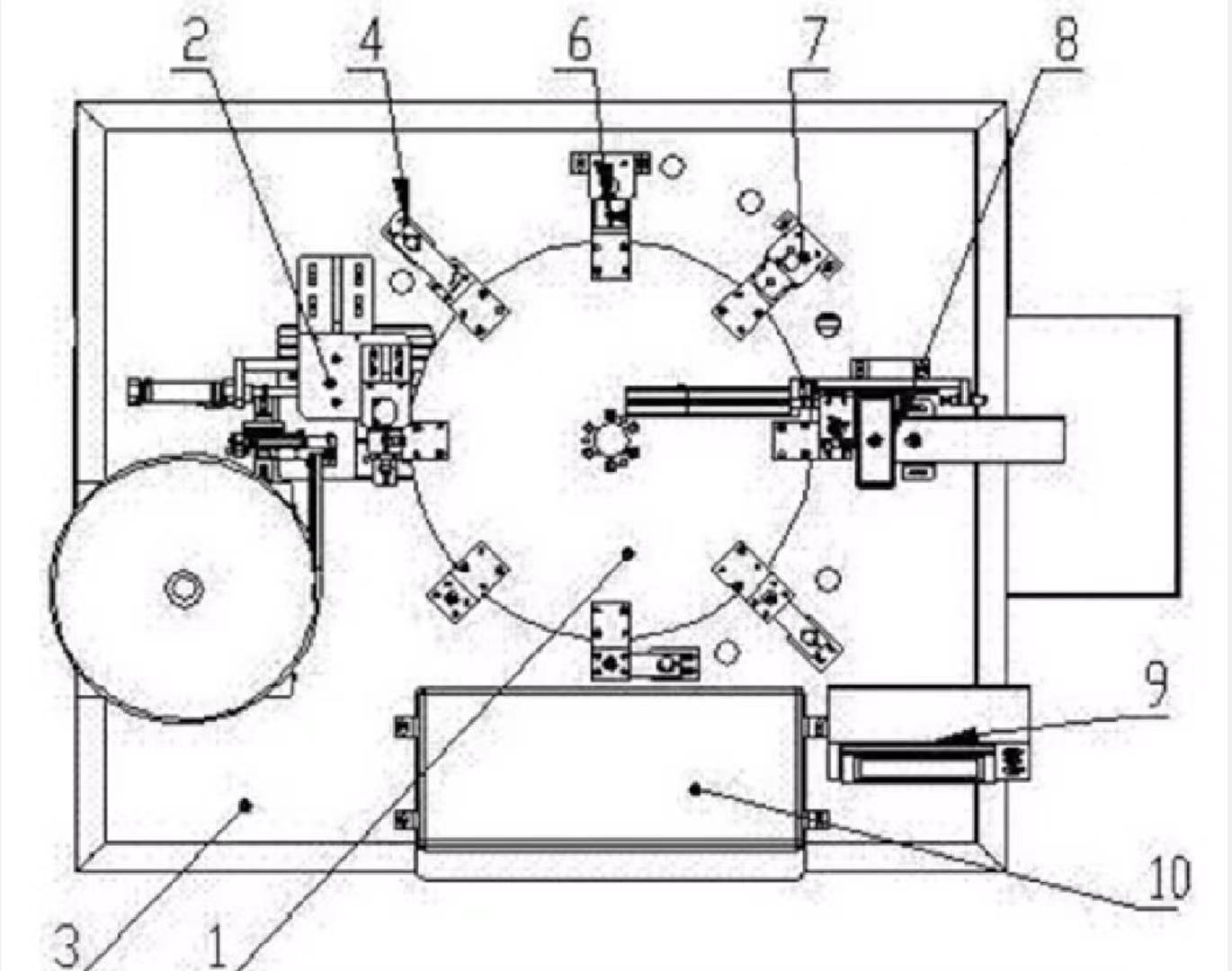
অপারেশন ইন্টারফেস এবং পিএলসি একটি লজিক কন্ট্রোল অংশ গঠন করে, এবং ডিটেকশন সিস্টেম এবং পিএলসিতে অ্যাসেম্বলি সিস্টেমের স্ট্যাটাস ডেটা সংগ্রহ এবং কন্ট্রোল সিগন্যাল আউটপুট করার জন্য দ্বিমুখী তথ্য প্রবাহ থাকে। এক্সিকিউটিভ অংশ হিসাবে, ড্রাইভ সিস্টেমটি সরাসরি পিএলসি আউটপুট অংশ দ্বারা নিয়ন্ত্রিত হয়। ফিডিং সিস্টেম ব্যতীত, যার জন্য ম্যানুয়াল সহায়তা প্রয়োজন, এই সিস্টেমের অন্যান্য প্রক্রিয়াগুলি বুদ্ধিমান অ্যাসেম্বলি উপলব্ধি করেছে। টাচ স্ক্রিনের মাধ্যমে ভাল মানব-কম্পিউটার মিথস্ক্রিয়া অর্জন করা হয়। যান্ত্রিক নকশায় অপারেশনের সুবিধা বিবেচনা করে, ডোর কোর প্লেসমেন্ট বক্সটি টাচ স্ক্রিনের সংলগ্ন। ডিটেকশন মেকানিজম, ডোর কোর টপ-ওপেনিং ব্লোয়িং কম্পোনেন্ট, ভালভ কোর হাইট ডিটেকশন কম্পোনেন্ট এবং ব্ল্যাঙ্কিং মেকানিজম যথাক্রমে টার্নটেবল টুলিং কম্পোনেন্টের চারপাশে সাজানো থাকে, যা ডোর কোর অ্যাসেম্বলির অ্যাসেম্বলি লাইন প্রোডাকশন লেআউট উপলব্ধি করে। ডিটেকশন সিস্টেমটি মূলত কোর রড ডিটেকশন, ইনস্টলেশন হাইট ডিটেকশন, কোয়ালিটি পরিদর্শন ইত্যাদি সম্পন্ন করে, যা কেবল উপাদান নির্বাচন এবং ভালভ কোর লকের অটোমেশন উপলব্ধি করে না, বরং অ্যাসেম্বলি প্রক্রিয়ার স্থিতিশীলতা এবং উচ্চ দক্ষতাও নিশ্চিত করে। সিস্টেমের প্রতিটি ইউনিটের গঠন চিত্র 1 এ দেখানো হয়েছে।.
নিচের চিত্রে দেখানো হয়েছে, টার্নটেবল হল সমগ্র প্রক্রিয়ার কেন্দ্রীয় লিঙ্ক, এবং টার্নটেবলের ড্রাইভ দ্বারা ভালভ কোরের সমাবেশ সম্পন্ন হয়। যখন দ্বিতীয় সনাক্তকরণ প্রক্রিয়াটি একত্রিত করার জন্য উপাদানটি সনাক্ত করে, তখন এটি নিয়ন্ত্রণ ব্যবস্থায় একটি সংকেত পাঠায় এবং নিয়ন্ত্রণ ব্যবস্থা প্রতিটি প্রক্রিয়া ইউনিটের কাজ সমন্বয় করে। প্রথমে, ভাইব্রেটিং ডিস্কটি দরজার কোরটি ঝাঁকিয়ে ইনটেক ভালভের মুখে লক করে দেয়। প্রথম সনাক্তকরণ প্রক্রিয়াটি সরাসরি ভালভ কোরগুলিকে খারাপ উপকরণ হিসাবে স্ক্রিন করবে যা সফলভাবে ইনস্টল করা হয়নি। উপাদান 6 সনাক্ত করে ভালভ কোরের বায়ুচলাচল যোগ্য কিনা, এবং উপাদান 7 সনাক্ত করে ভালভ কোরের ইনস্টলেশন উচ্চতা মান পূরণ করে কিনা। উপরের তিনটি লিঙ্কে যোগ্য পণ্যগুলিই কেবল ভাল পণ্য বাক্সে ক্যাপচার করা হবে, অন্যথায় সেগুলিকে ত্রুটিপূর্ণ পণ্য হিসাবে বিবেচনা করা হবে।
বুদ্ধিমান সমাবেশভালভ কোরসিস্টেম ডিজাইনের কারিগরি অসুবিধা। এই ডিজাইনে, একটি তিন-সিলিন্ডার নকশা গৃহীত হয়। স্লাইড সিলিন্ডার স্রাবের স্বতন্ত্রতা নিশ্চিত করার জন্য স্রাব নিয়ন্ত্রণ করে; দ্বিতীয় সিলিন্ডার নিশ্চিত করে যে লক রডটি স্রাব গর্তের সাথে সারিবদ্ধ, এবং তারপর লক রডে প্রবেশ করা ভালভ কোরটি সম্পূর্ণ করতে স্লাইড সিলিন্ডারের সাথে সহযোগিতা করে, এবং তারপর দ্বিতীয় সিলিন্ডারটি পুরো লকিং প্রক্রিয়াটিকে সরানোর জন্য ধাক্কা দিতে থাকে, এবং সাকশন নোজেল টুলিংয়ের নীচে পৌঁছালে ভালভটি চুষে নেবে। অবশেষে, তৃতীয় সিলিন্ডার লকিং প্রক্রিয়াটিকে জায়গায় ঠেলে দেওয়ার পরে, সার্ভো মোটর ভালভ কোরের সমাবেশ সম্পূর্ণ করার জন্য ভালভ কোরটিকে ইনটেক ভালভ মুখের কাছে পাঠায়। এই প্রক্রিয়াটি অনুদৈর্ঘ্য এবং পার্শ্বীয় চলাচলের অবস্থানের নির্ভুলতা এবং স্বতন্ত্রতা নিশ্চিত করে এবং দরজার কোর সমাবেশের প্রযুক্তিগত অসুবিধাগুলির একটি ভাল সমাধান প্রদান করে।.
৩. ভালভ কোর অ্যাসেম্বলি সিস্টেমের মূল উপাদানগুলির নকশা
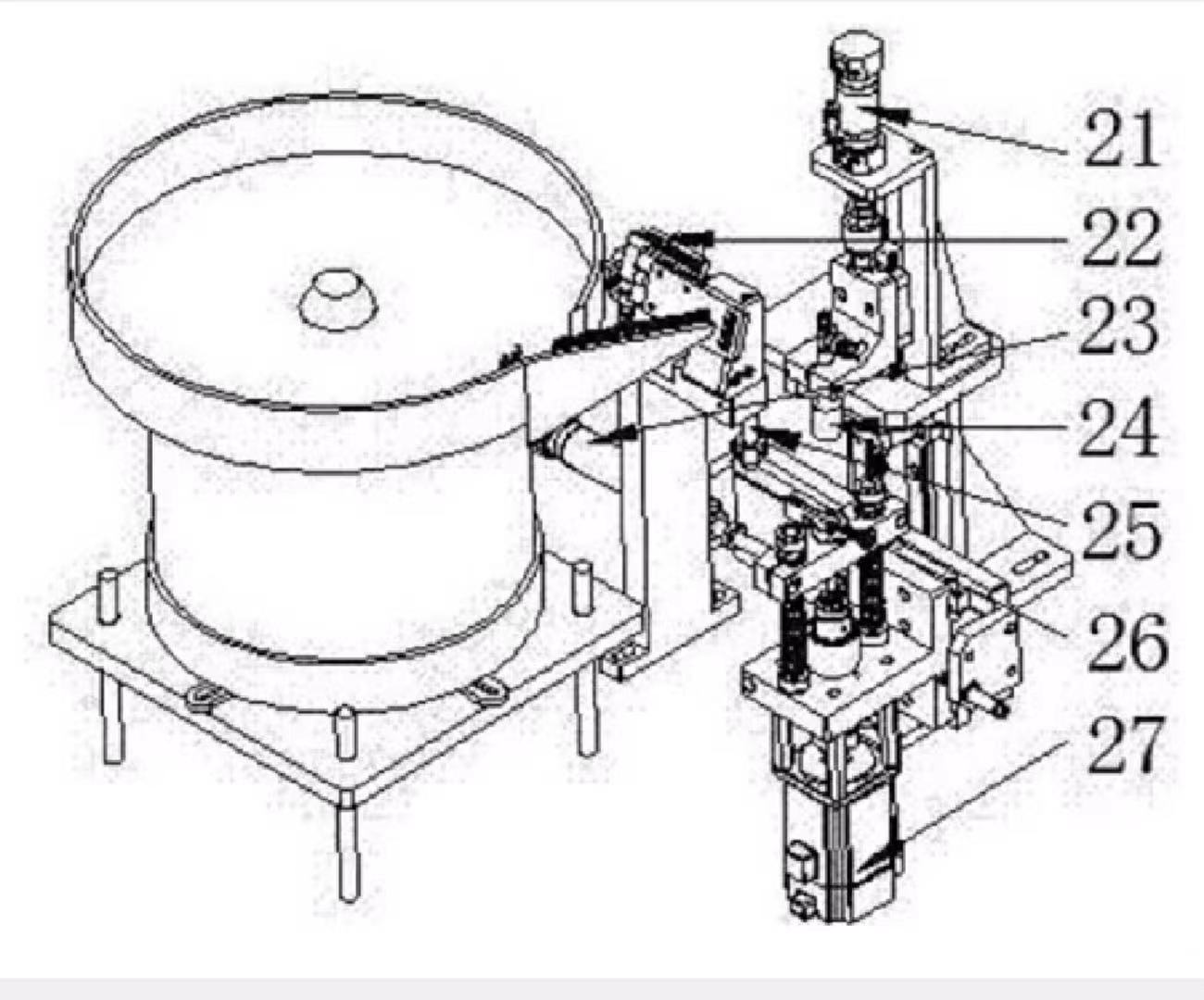
ইনস্টল করার মূল প্রক্রিয়া হিসেবেভালভ কোরভালভের উপর, ভালভ কোর লক করার জন্য ভালভ কোরের গতিবিধির অবস্থানের নির্ভুলতার উপর খুব বেশি প্রয়োজনীয়তা রয়েছে, তাই এটি সম্পূর্ণ করার জন্য অনুদৈর্ঘ্য এবং পার্শ্বীয় প্রক্রিয়াগুলির সমন্বয় প্রয়োজন। এই অংশের নকশায়, এটি একটি একক ক্রিয়ায় বিভক্ত, ভালভ কোরের ডিসচার্জিং ক্রিয়া, লকিং লিভারের লকিং ক্রিয়া এবং ভালভ নজলে ভালভ কোর লোড করার ক্রিয়া। এর যান্ত্রিক কাঠামো চিত্র 2 এ দেখানো হয়েছে। চিত্র 2 থেকে দেখা যাচ্ছে, ভালভ কোর অ্যাসেম্বলির যান্ত্রিক কাঠামো তিনটি অংশে বিভক্ত। তিনটি অংশ একে অপরকে প্রভাবিত না করেই সমন্বয়ের সাথে কাজ করে। স্বাধীন ক্রিয়া সম্পন্ন হলে, সিলিন্ডার পরবর্তী অ্যাসেম্বলি অবস্থানে যাওয়ার জন্য প্রক্রিয়াটিকে ধাক্কা দেয়।
চলমান অবস্থানের নির্ভুলতা নিশ্চিত করার জন্য, 1.4 মিমি এর মধ্যে ত্রুটি নিয়ন্ত্রণ করার জন্য বৈদ্যুতিক নিয়ন্ত্রণ এবং যান্ত্রিক সীমার বিস্তৃত নকশা গ্রহণ করা হয়। ভালভ কোর এবং ভালভ নজলের কেন্দ্রটি সমঅক্ষীয়, যাতে সার্ভো মোটর ভালভ কোরটিকে ভালভ নজলে মসৃণভাবে ঠেলে দিতে পারে, অন্যথায় এটি অংশগুলির ক্ষতি করবে। যান্ত্রিক কাঠামোর স্থবিরতা বা বৈদ্যুতিক সংকেতের অস্বাভাবিক পালস সমাবেশের কাজে সামান্য বিচ্যুতি ঘটাতে পারে। ফলস্বরূপ, ভালভ কোর একত্রিত হওয়ার পরে, বায়ুচলাচল কর্মক্ষমতা মানসম্মত হয় না এবং সমাবেশের উচ্চতা যোগ্য হয় না, যা পণ্যটির ব্যর্থতার দিকে পরিচালিত করে। সিস্টেম ডিজাইনে এই ফ্যাক্টরটি সম্পূর্ণরূপে বিবেচনা করা হয়, খারাপ পণ্যগুলি বাছাই করার জন্য বায়ু ব্লো সনাক্তকরণ এবং উচ্চতা সনাক্তকরণ ব্যবহার করা হয়।.
পোস্টের সময়: সেপ্টেম্বর-০৯-২০২২
